

周末在家发现了一个挺有意思的项目:
「也就是将你模型中的参数全部存储为一个连续的内存块,加速你的模型训练。」
于是我抱着试试看的心态,基于Fairseq和LightSeq分别实现了两个单层的Transformer编码层模型,简单写了一个例子试了一下。
安装
首先为了运行我这个例子,你需要安装上面提到的contiguous-params库。然后还需要安装fairseq和lightseq库。
- pip install contiguous-params fairseq lightseq
一个简单的例子
我这里创建了一个模型,就是单层的Transformer编码层,然后随机输入一个向量,损失函数就是输出向量的所有元素的平方均值。
然后测试了采用参数连续化前后,前向传播、反向传播、梯度更新三部分的时间消耗。
- import time
- from dataclasses import dataclass
- import copy
- import torch
- from fairseq.modules.transformer_layer import TransformerEncoderLayer
- from lightseq.training.ops.pytorch.transformer_encoder_layer import LSTransformerEncoderLayer
- from contiguous_params import ContiguousParams
- def get_time():
- '''CUDA同步并获取当前时间'''
- torch.cuda.synchronize(device="cuda:0")
- return time.time()
- def ls_config_to_fs_args(config):
- '''将LightSeq的config转换为Fairseq的args'''
- @dataclass
- class Args:
- encoder_embed_dim: int
- encoder_ffn_embed_dim: int
- encoder_attention_heads: int
- dropout: float
- attention_dropout: float
- activation_dropout: float
- encoder_normalize_before: bool
- args = Args(
- config.hidden_size,
- config.intermediate_size,
- config.nhead,
- config.hidden_dropout_ratio,
- config.attn_prob_dropout_ratio,
- config.activation_dropout_ratio,
- config.pre_layer_norm
- )
- return args
- def train(model, inputs, masks, contiguous=False):
- '''训练过程'''
- model.to(device="cuda:0")
- model.train()
- if contiguous:
- parameters = ContiguousParams(model.parameters())
- opt = torch.optim.Adam(parameters.contiguous(), lr=1e-3)
- else:
- opt = torch.optim.Adam(model.parameters(), lr=1e-3)
- fw_time, bw_time, step_time = 0, 0, 0
- for epoch in range(1000):
- opt.zero_grad()
- start_time = get_time()
- outputs = model(inputs, masks)
- loss = torch.square(outputs).mean()
- fw_time = get_time() - start_time
- start_time = get_time()
- loss.backward()
- bw_time = get_time() - start_time
- start_time = get_time()
- opt.step()
- step_time = get_time() - start_time
- if epoch % 200 == 0:
- print("epoch {:>3d}: loss = {:>5.3f}".format(epoch, loss))
- return fw_time, bw_time, step_time
- if __name__ == "__main__":
- # 定义LightSeq的config
- config = LSTransformerEncoderLayer.get_config(
- max_batch_tokens=4096,
- max_seq_len=256,
- hidden_size=128,
- intermediate_size=512,
- nhead=16,
- attn_prob_dropout_ratio=0.1,
- activation_dropout_ratio=0.1,
- hidden_dropout_ratio=0.1,
- pre_layer_norm=True,
- fp16=False,
- local_rank=0
- )
- # 将LightSeq的config转换为Fairseq的args
- args = ls_config_to_fs_args(config)
- # 随机生成输入
- bsz, sl = 50, 80
- inputs = torch.randn(bsz, sl, config.hidden_size).to(device="cuda:0")
- masks = torch.zeros(bsz, sl).to(device="cuda:0")
- # 定义LightSeq模型并训练
- ls_model = LSTransformerEncoderLayer(config)
- ls_fw_time, ls_bw_time, ls_step_time = train(ls_model, inputs, masks)
- # 定义连续化参数的LightSeq模型并训练
- config_cont = copy.deepcopy(config)
- ls_model_cont = LSTransformerEncoderLayer(config_cont)
- ls_c_fw_time, ls_c_bw_time, ls_c_step_time = train(ls_model_cont, inputs, masks, contiguous=True)
- inputs = inputs.transpose(0, 1)
- masks = masks > 0.5
- # 定义Fairseq模型并训练
- fs_model = TransformerEncoderLayer(args)
- fs_fw_time, fs_bw_time, fs_step_time = train(fs_model, inputs, masks)
- # 定义连续化参数的Fairseq模型并训练
- fs_model_cont = TransformerEncoderLayer(args)
- fs_c_fw_time, fs_c_bw_time, fs_c_step_time = train(fs_model_cont, inputs, masks, contiguous=True)
- print("LightSeq time: {:.3f}s, {:.3f}s, {:.3f}s".format(ls_fw_time, ls_bw_time, ls_step_time))
- print("LightSeq (cont) time: {:.3f}s, {:.3f}s, {:.3f}s".format(ls_c_fw_time, ls_c_bw_time, ls_c_step_time))
- print("Fairseq time: {:.3f}s, {:.3f}s, {:.3f}s".format(fs_fw_time, fs_bw_time, fs_step_time))
- print("Fairseq (cont) time: {:.3f}s, {:.3f}s, {:.3f}s".format(fs_c_fw_time, fs_c_bw_time, fs_c_step_time))
详细讲解
这里最主要的地方就两行:
- parameters = ContiguousParams(model.parameters())
- opt = torch.optim.Adam(parameters.contiguous(), lr=1e-3)
首先用ContiguousParams类封装model.parameters(),然后将封装后的parameters.contiguous()送进优化器中,这里送进去的就已经是连续存储的一整块参数了。
我们详细阅读ContiguousParams的源码,可以发现实现很简单:
https://github.com/PhilJd/contiguous_pytorch_params/blob/master/contiguous_params/params.py
核心代码就是下面这个函数,注释中我都详细解释了每一步在干嘛:
- def make_params_contiguous(self):
- index = 0
- # 遍历所有的参数
- for p in self._parameters:
- # 计算参数p的大小
- size = p.numel()
- # 在连续参数块中的对应位置赋值参数p
- self._param_buffer[index:index size] = p.data.view(-1)
- # 将参数p的数值和梯度都重新指向连续参数块和连续梯度块的对应位置
- p.data = self._param_buffer[index:index size].view(p.data.shape)
- p.grad = self._grad_buffer[index:index size].view(p.data.shape)
- # 连续内存块位置偏移到下一个参数
- index = size
- # 连续参数块的梯度设置为连续梯度块
- self._param_buffer.grad = self._grad_buffer
所以在封装了原始参数之后,之后模型计算就会从连续内存块中对应位置取出数值,然后进行计算。
运行结果
我在V100显卡上运行了一下上面的例子,结果如下:
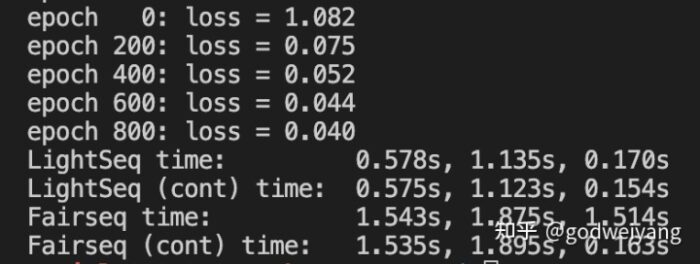
可以看出,LightSeq在采用参数连续化前后,三部分运行时间几乎没有任何变化,这主要是由于LightSeq已经在模型内部做过参数连续化了,因此速度已经很快了。
而Fairseq前后的第三部分,也就是参数更新部分时间缩减非常多,从1.5秒缩短到了0.1秒,总的训练时间几乎缩短了将近一半。
最后对比LightSeq和Fairseq可以明显发现,LightSeq的训练时间比Fairseq快非常多。主要是因为LightSeq采用了算子融合等各种技术,加速了Transformer模型的训练。
总结
所以在你的 「任意」 PyTorch模型中,都可以用上面的参数连续化技术大大加快训练速度。
而如果你的模型是Transformer类模型,那还可以直接用字节跳动开源的LightSeq训练加速引擎,更加方便。
如果你是TensorFlow爱好者,还可以直接用字节跳动开源的NeurST序列生成库进行训练,里面直接集成了LightSeq,所以训练很快。
地址
参数连续化
https://github.com/PhilJd/contiguous_pytorch_params
LightSeq
https://github.com/bytedance/lightseq